Tout réseau miniature, du plus simple au plus compliqué, contient des parties mécaniques fixes (menuiserie, rails, décors statiques etc.) et des parties mécaniques mobiles (trains, appareils de voie, décors animés, etc.).
Avant toute chose il faut s'entendre sur ce que l'on appelle " mécanique".
Une mécanique n'est rien d'autre qu'un assemblage de plusieurs pièces. Cet assemblage peut être :
-
Statique : c'est à dire rigide ou fixe. Autrement dit, l'assemblage n'est pas censé se déplacer ni se déformer. C'est le cas de la menuiserie du réseau, des rails, et des décors non animés qui ne sont pas destinés à changer de position les uns par rapport aux autre. Un assemblage mécanique statique est obtenu par vissage, boulonnage, collage, ou soudure (brasure) pour citer les techniques les plus courantes.

- Dynamique : c'est à dire que l'assemblage peut être souple ou articulé. Autrement dit, l'assemblage est le siège d'un mouvement (glissement, translation, rotation, déformation, etc.)
Evidemment, un assemblage dynamique peut être fixé sur un support, comme un moulin à vent dont les ailes tournent (assemblage dynamique) mais qui serait fixé sur le réseau (assemblage statique).
Qui dit "commande" dit "mouvement"...
Qui dit commande mécanique dit mouvement, action. Un interrupteur, par exemple, est une commande mécanique que l'on doit actionner pour permettre au courant électrique de passer.
Cela veut dire que sur un réseau de train il y a obligatoirement une commande mécanique à un endroit ou à un autre, et un train roulera forcément. Si ce n'est pas le cas, ce n'est plus du "modélisme ferroviaire" mais du "maquettisme ferroviaire".
Il n'y a que deux mouvements possibles : la translation et la rotation.
Le plus souvent une commande mécanique est une combinaison des deux mouvements.
Pour qu'il y ait rotation, il faut un axe.
Lorsqu'une mécanique qui fait un mouvement de translation est couplée à une mécanique faisant une rotation, son mouvement n'est plus rectiligne.
En effet, Si une extrémité de la mécanique "Translation" est liée mécaniquement à une des extrémités de la mécanique "Rotation", elle ne pourra plus translater de façon rectiligne mais suivra la trajectoire courbée, comme un mouvement de "vague" : le louvoiement.
- Plus la mécanique "Translation" est longue, moins le louvoiement est sensible.
- Plus la mécanique "rotation" est longue (grand rayon), plus le louvoiement est sensible.
- Pour supprimer le louvoiement, il faut interposer une bielle entre la tirette et l'équerre.


Le louvoiement doit être pris en compte, surtout si plusieurs commendes sont installées côte à côte pour éviter qu'elles ne se gênent si elles sont montées trop près les une des autres.

Des leviers pour mettre en mouvement
Ça va peut-être vous paraître idiot (ou évident), mais pour que "quelque chose" bouge, il faut "quelque chose", une mécanique en ce qui concerne le type de commande qui nous occupe.
Cette mécanique reçoit et transmet des "ordres", c'est à dire des mouvements afin qu'à une action donnée corresponde le résultat escompté. Par exemple l'action sur une tirette change la position d'un aiguillage ou d'un groupe d'aiguillage déterminé pour programmer un itinéraire.
Ainsi, en actionnant la tirette l'aiguillage présente soit la position directe...

... soit la direction renversée ou déviée.
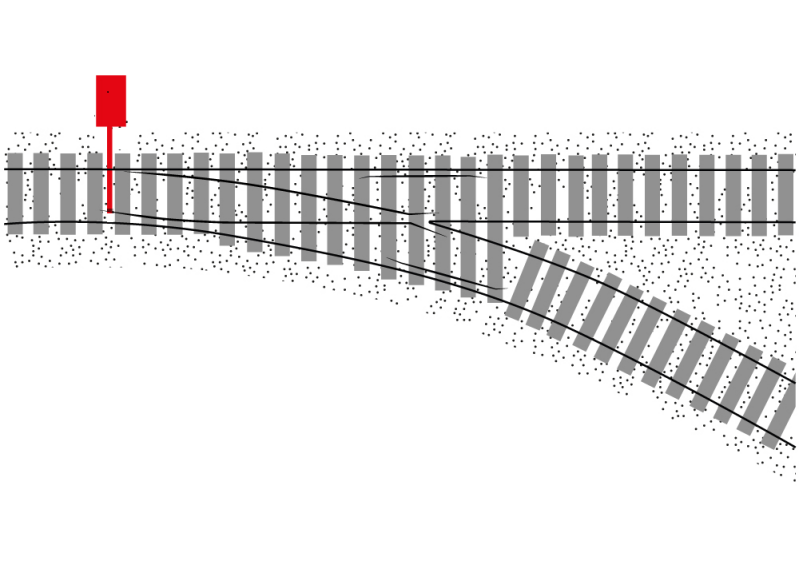
Plus qu'un long discourt, une petite animation montre le mouvement de l'aiguille en fonction de celui de la tirette.

En fait les choses sont un peu plus complexe qu'il n'y paraît, et certains paramètres sont à prendre en compte lors de l'installation de la tirette de commande.
Dans l'absolu, les aiguilles étant articulées, seule une extrémité est mobile alors que son opposée est un axe. Le mouvement est donc une rotation.
La tirette de son côté se déplace de façon linéaire. Son mouvement est donc une translation.
Si la tige reliant le tirette aux aiguilles est rigide, le mouvement est impossible car la translation pure est incompatible avec la rotation dans une liaison mécanique "parfaite", c'est à dire sans jeu. En effet, le mouvement résultant est à la fois une rotation et une translation : c'est un mouvement de louvoiement.
Je l'ai mis en gras car c'est important et à l'usage c'est le mouvement le plus fréquent et, parfois, le plus contraignant.
Rien que dans l'énoncé du problème, une solution apparaît d'emblée : il suffit de donner suffisamment de jeu au niveau de la liaison tirette - aiguilles.
En pratique un trou suffisamment grand permet d'absorber "l'incompatibilité" entre la rotation et la translation au prix d'un certain jeu dans la commande.
Ce n'est pas un problème pour les petites échelles (HO et en-dessous) où le mouvement n'excède guère 1 ou 2 millimètres et l'on peut considérer ce jeu fonctionnel négligeable.
Pour les échelles plus grandes (I, O), ce jeu peut être plus gênant. Dans ce cas, une tige assez élastique permet de compenser la rotation des aiguilles. c'est évidement valable pour les échelles plus petites et parfois préférable pour un fonctionnement fiable au long-cours.
Pour les échelles le plus grandes (3" et au-dessus) le recours à une tige articulée est incontournable à mon sens...
Dans tous les cas, dès qu'une tirette unique commande plusieurs appareils, le recours à des tiges articulées est inévitable, ne serait-ce qu'à cause des courses qui ne sont jamais strictement identiques d'un appareil à l'autre (tolérances de fabrication industrielle obligent). Pour les plus petites échelles le recours à des liaisons élastiques pourrait être envisageable, mais leur mise au point risque fort d'être délicate à moins d'opter pour une commande funiculaire, elle aussi délicate à mettre au point et sujette à de fréquents dérèglements.
Une alternative funiculaire intéressante pour des commandes simples est le câble Bowden
Une corde à piano fine dans un tube de laiton de 1 ou 2 mm de diamètre peut très bien en tenir lieu pour les petites échelles.
L'avantage de ce système est la possibilité de faire suivre à la transmission à peu près n'importe quel trajet et de s'affranchir d'articulations dont l'encombrement et la complexité peuvent poser problème.
Evidemment, il est possible d'utiliser ensemble toutes les solutions décrites ci-dessus pour une seule commande mécanique. Tous les coups sont permis tant que cela fonctionne...
La mise en œuvre sera détaillée au fur et à mesure de l'avancement de mes différents réseaux et dans la rubrique "Passons à la pratique...".
A SUIVRE...

Si vous avez des questions ou des remarques :
* Obligatoire. Vous pouvez utiliser votre pseudonyme à la place de votre nom.
Ajouter un commentaire
Commentaires